压力传感器的滞后是什么?
滞后是压力传感器精度的衡量指标,指的是特定压力下经过多次压力增加和减少循环后输出读数的差异。以下是简单的概述:
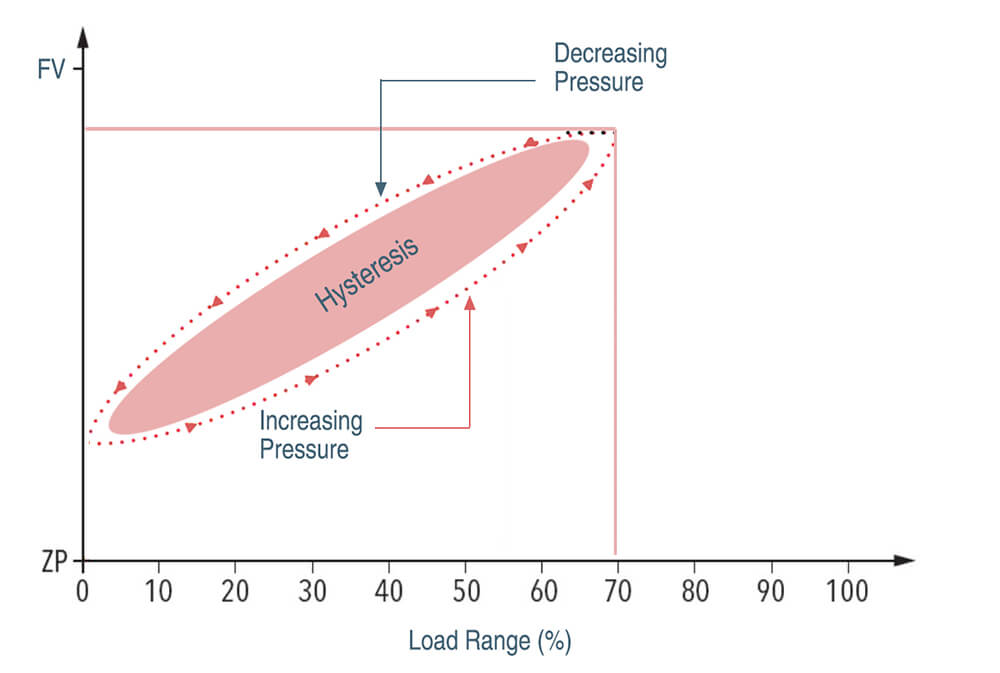
当您向传感器施加压力然后释放该压力时,传感器的输出理论上应该会返回到特定压力循环之前的值。然而,实际上,压力循环后的初始值和最终值之间通常会有微小的差异。
这种差异称为滞后,是由传感器内的各种物理现象引起的。
理想传感器应具有零滞后。但在实践中,滞后始终是某个非零值,并且传感器规格将说明传感器测量范围内各种压力下的最大滞后是多少。
滞后通常以满量程输出的百分比或压力单位(psi、bar、Pa 等)表示。例如,压力传感器可能具有:
滞后≤1%满量程——意味着压力循环后初始读数和最终读数之间的最大差异将是传感器满量程测量范围的 1% 或更小。
滞后≤10 psi – 意味着读数之间的最大差异为 10 psi 或更小,无论传感器的满量程范围如何。
滞后误差很难与其他误差区分开来,并且无法预测特定时刻的滞后误差,因为它取决于测量之前压力是增加还是减少。
滞后和灵敏度有什么区别?
滞后和灵敏度是压力传感器的两个不同但相关的特性:
滞后是指特定压力在多个压力循环中的读数差异,如前所述。它表示传感器的准确度和精度,以满量程输出的百分比(例如 0.5%/FS)或压力单位(psi、bar、Pa 等)表示。
灵敏度是指传感器输出(电压、电流、频率)相对于测量压力变化的变化。灵敏度以 mV/psi、mA/bar、Hz/kPa 等单位表示,例如 3mv/psi。
让我们简单地说一下:
滞后描述了读数的准确性和可重复性
滞后表示传感器在给定压力下重现相同读数的能力,显示准确性和一致性,以 0.2%/FS 表示
灵敏度描述分辨率和测量范围
灵敏度表示传感器的分辨率和范围,显示它对不同压力水平的区分程度,以 2mv/psi 表示
反向关系
滞后和灵敏度之间存在反比关系——当一个增加时,另一个通常会减少。
灵敏度越高通常意味着传感器可以检测到较小的压力变化,因此占满量程百分比的滞后将会越低。
然而,更高的灵敏度也可能使传感器更容易受到导致滞后的外部因素的影响,例如材料应力和偏转。
最后,制造商必须优化传感器设计,以最大程度地提高灵敏度,同时最大程度地减少滞后现象。这种平衡行为是关键的性能权衡。
滞后如何影响压力传感器性能?
基于前面的讨论,您可能了解了滞后和灵敏度之间的区别,下面我们继续讨论滞后如何影响压力传感器的性能。
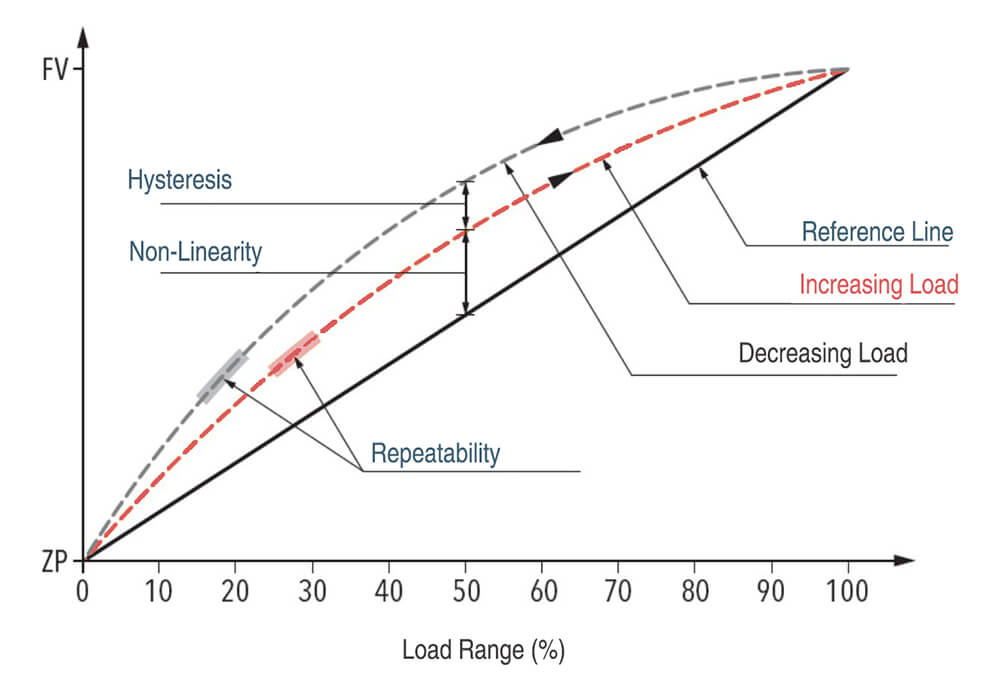
滞后现象会以几种关键方式影响压力传感器的性能,并且滞后现象会产生各种类型的误差和非理想效应,从而降低准确度、重复性、稳定性、精度和分辨率等关键传感器性能指标。这些性能影响的程度通常会随着滞后现象的增大而增大。
准确度 –正如我们所讨论的,滞后表示与准确压力读数的偏差。滞后越大,传感器输出的准确度就越低。
重复性——具有高滞后性的传感器不会在相同压力下提供一致的读数,从而影响传感器的重复性和再现性。
稳定性——随着时间的推移,由于材料应力和组件磨损,滞后现象会逐渐增加,从而降低传感器的稳定性和使用寿命。
噪声——滞后效应可以表现为传感器输出的低频噪声或漂移,从而降低信噪比。
精度——滞后限制了传感器可以分辨的最低可检测压力变化,从而影响整体测量精度。
测量误差– 滞后值本身代表“真实”压力值所在的误差带。滞后越大,测量误差越大。
校准——具有高滞后的传感器需要更复杂的校准方案来补偿滞后效应,从而增加了成本和复杂性。
系统性能——传感器的迟滞会限制任何压力传感器测量系统。对精度要求严格的应用受影响最大。
这就是为什么传感器规格通常会根据预期应用的要求对最大允许滞后设置严格限制的原因。
制造商如何确保压力传感器具有低滞后性?
压力传感器制造商采用以下几种主要方法来最大程度地减少滞后:
传感器材料选择– 某些材料天生就比其他材料更容易产生滞后效应。制造商会选择尽可能减少滞后的传感器材料,如隔膜、密封件和填充液。
优化的传感器设计——可以优化传感器设计特征,例如隔膜形状、尺寸和厚度以及密封设计,以减少引起滞后的摩擦、粘连和变形。
老化和老化测试– 新型传感器通常具有较高的初始磁滞,但随着材料稳定和顺应,磁滞会随时间而减小。制造商会进行老化和老化测试,以识别具有较高初始磁滞的传感器并优化“磨合”过程。
严格的过程控制——制造商保持非常严格的生产公差和过程控制,以确保传感器之间的一致性,并最大限度地减少可能影响滞后的差异性。
补偿和校准——一些制造商采用数字补偿算法或多点校准来对传感器输出中的残余滞后进行数学建模和校正。这需要准确的滞后特性。
所有这些制造技术和质量控制都有助于最大限度地减少磁滞并确保传感器性能符合规定。最关键的因素是准确表征每个传感器的磁滞,以便做出适当的补偿、校准和分档决策。
举一个例子来阐明滞后现象。
我们以一个真实的行业案例为例来说明压力传感器中的滞后现象:
假设你有一个满量程为 100 psi 的压力传感器。你慢慢地将压力从 0 增加到 50 psi,传感器输出读数为 2.500 伏。
然后慢慢将压力降至 0 psi。理想情况下,传感器输出应恢复到其开始时的原始 0 V 水平。
然而,由于滞后现象,当压力再次达到 0 psi 时,传感器输出仅返回到 0.050 V。
因此在这个例子中:
“真实”压力为 0 psi
0 psi 时的初始传感器输出为 0 V
但在压力循环上升至 50 psi 并回落后,传感器读数为 0.050 V
初始 0 V 读数与最终 0.050 V 读数之间的差值为 0.050 V
此 0.050 V 差异是此传感器在 0 psi 时的滞后
以满量程的百分比表示,滞后为:0.050 V / 2.500 V = 0.02% 满量程
或者以压力单位表示,假设 50 psi 的压力变化导致 2.500 V 的输出变化,则滞后为:0.050 V / 2.500 V * 50 psi = 1 psi
滞后是指压力循环前后相同压力下的传感器读数差异
它可以表示为绝对值(本例中为 0.050 V)、满量程的百分比(0.02%)或测量变量的单位(1 psi)
传感器指定的最大滞后将指示它所指的这些值(V、%,psi)中的哪一个
正如我们之前讨论过的,滞后量会影响传感器的准确性、重复性和测量误差
